蒸蒸日上的貨運(yùn)服務(wù)市場(chǎng)正在改變著運(yùn)輸業(yè)——更多的訂單、包裹以及免運(yùn)費(fèi)送貨服務(wù)。因此需要制定方案來(lái)使整體物流鏈更加高效,從而應(yīng)對(duì)日益擁阻的城市交通,減少駕駛員和公路的壓力,并降低貨運(yùn)成本。通過(guò)其 SafeRange 自主機(jī)動(dòng)功能,采埃孚 2016 創(chuàng)新型卡車(chē)展示了傳感器、智能電子和機(jī)械系統(tǒng)可以如何通過(guò)將車(chē)輛和倉(cāng)庫(kù)聯(lián)網(wǎng)來(lái)優(yōu)化轉(zhuǎn)運(yùn)中心的流程。基于固定攝像頭的數(shù)據(jù),這款概念車(chē)可以向裝卸位自動(dòng)挪移,既精準(zhǔn)高效,又實(shí)現(xiàn)了本地零排放。
采埃孚(ZF)在2016 創(chuàng)新卡車(chē)上開(kāi)發(fā)了挪移輔助功能,將卡車(chē)與基礎(chǔ)設(shè)施進(jìn)行互聯(lián)——主要通過(guò)攝像頭和裝卸位的處理裝置控制卡車(chē)上的智能機(jī)械系統(tǒng)。
高效性、安全性、自動(dòng)化和互聯(lián)化正在改變著交通運(yùn)輸?shù)母鱾€(gè)領(lǐng)域。這一現(xiàn)象也同樣發(fā)生在物流行業(yè),蓬勃發(fā)展的貨運(yùn)服務(wù)市場(chǎng)需要供應(yīng)鏈的新型解決方案來(lái)滿(mǎn)足日益增長(zhǎng)的服務(wù)需求,以應(yīng)對(duì)不斷增加的成本壓力。數(shù)字化、云連接和智能路徑規(guī)劃為全新的、靈活的、定制的運(yùn)輸理念鋪平了道路,大規(guī)模互聯(lián)化以及系統(tǒng)和功能自動(dòng)化則可以大幅提高倉(cāng)庫(kù)和轉(zhuǎn)運(yùn)中心的工作效率和安全性。
畢竟,挪移車(chē)輛過(guò)程中發(fā)生碰撞會(huì)導(dǎo)致高昂的車(chē)輛損失并耗費(fèi)停機(jī)時(shí)間,導(dǎo)致裝卸工作延遲。安全無(wú)誤地將卡車(chē)挪移進(jìn)裝卸位需要通過(guò)掛車(chē)上的傳感器對(duì)復(fù)雜環(huán)境進(jìn)行識(shí)別。如此一來(lái),運(yùn)輸公司的整個(gè)掛車(chē)車(chē)隊(duì)都需要配備這種基礎(chǔ)設(shè)施,然而這對(duì)于成本控制嚴(yán)格的物流行業(yè)來(lái)說(shuō)是不現(xiàn)實(shí)的。

即使最有經(jīng)驗(yàn)的卡車(chē)駕駛員也會(huì)為挪移過(guò)程中向右側(cè)倒車(chē)感到頭疼,自主機(jī)動(dòng)輔助功能便可以游刃有余地完成任務(wù)。
“這就是為什么我們?cè)诓砂f?016 創(chuàng)新型卡車(chē)上對(duì)自主機(jī)動(dòng)功能進(jìn)行進(jìn)一步系統(tǒng)開(kāi)發(fā)的原因”,采埃孚商用車(chē)技術(shù)事業(yè)部卡車(chē)與貨車(chē)傳動(dòng)技術(shù)主管 Winfried Gründler 解釋說(shuō)。這一切都要從采埃孚(ZF)2014 年推出的方案說(shuō)起。這一方案可以通過(guò)平板電腦對(duì)超長(zhǎng)的重載卡車(chē)實(shí)現(xiàn)輕松的手控挪移。Gründler 表示:“通過(guò)這輛2016 創(chuàng)新型卡車(chē),我們提供了一個(gè)非常實(shí)用的方案,從而可以?xún)?yōu)化物流業(yè)的工作流程,同時(shí)也考慮到了運(yùn)輸公司成本控制的各種因素”。
將裝卸位和卡車(chē)互聯(lián)
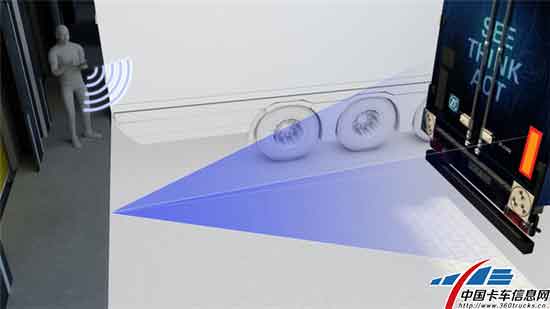
2016 創(chuàng)新型卡車(chē)采用了一種新的方案——能夠自動(dòng)觸發(fā)卡車(chē)電氣化機(jī)械系統(tǒng)的“眼睛”和“大腦”不一定要安裝在卡車(chē)上,而是將卡車(chē)和倉(cāng)庫(kù)進(jìn)行互聯(lián),以執(zhí)行SafeRange 半自動(dòng)挪移功能。需要進(jìn)行機(jī)動(dòng)操作的卡車(chē)只需要在掛車(chē)上有一個(gè)目標(biāo),以便于坡道上的固定攝像頭能夠探測(cè)。

天合的商用車(chē)主動(dòng)電動(dòng)轉(zhuǎn)向系統(tǒng) ReAX 為采埃孚 2016 創(chuàng)新型卡車(chē)的自主機(jī)動(dòng)輔助功能提供了理想的轉(zhuǎn)向支持。
安裝在倉(cāng)庫(kù)的計(jì)算機(jī)負(fù)責(zé)計(jì)算行駛軌跡,并將數(shù)據(jù)通過(guò)無(wú)線(xiàn)網(wǎng)絡(luò)傳輸?shù)娇ㄜ?chē)上的采埃孚(ZF)Openmatics 汽車(chē)信息系統(tǒng)的車(chē)載設(shè)備中,然后車(chē)輛控制系統(tǒng)根據(jù)接收的信息進(jìn)行操作。該系統(tǒng)使用采埃孚(ZF)天合的ReAX 主動(dòng)電動(dòng)轉(zhuǎn)向系統(tǒng)以及TraXon 混合動(dòng)力自動(dòng)變速箱系統(tǒng),以電動(dòng)模式操縱卡車(chē)轉(zhuǎn)向裝卸位,從而實(shí)現(xiàn)本地零排放。
此外,從駕駛室外部可以通過(guò)平板電腦作為另一套人機(jī)界面控制系統(tǒng)來(lái)操控卡車(chē)。與采埃孚(ZF)在2014年提出的方案不同的是,操作該系統(tǒng)的人無(wú)需人工挪移車(chē)輛;操作員只需用平板電腦啟動(dòng)對(duì)卡車(chē)的挪移,該功能即可被激活,并保持直到車(chē)輛行駛到指定位置。

采埃孚(ZF)在其互聯(lián)解決方案中采用了專(zhuān)有的硬件和市場(chǎng)上可供應(yīng)的系統(tǒng)。這種組合確保了采埃孚(ZF)的軟件能夠精確地分析來(lái)自固定攝像頭的圖像。在初始挪移階段,卡車(chē)與裝卸位呈90 度,此時(shí)擋住了攝像頭的目標(biāo)。由于在這一位置上沒(méi)有攝像頭圖像,卡車(chē)就要使用GPS 數(shù)據(jù)確定行駛軌跡來(lái)進(jìn)行控制。如果車(chē)輛上沒(méi)有安裝Openmatics 系統(tǒng),則可以使用其他無(wú)線(xiàn)網(wǎng)絡(luò)方案將計(jì)算機(jī)信號(hào)傳輸?shù)娇ㄜ?chē)上。
在進(jìn)行挪移操作時(shí),經(jīng)過(guò)計(jì)算的數(shù)據(jù)被傳遞給車(chē)輛,車(chē)輛的挪移控制器則將目標(biāo)速度和目標(biāo)最大轉(zhuǎn)向角等信息傳遞到采埃孚(ZF)傳動(dòng)系統(tǒng)和轉(zhuǎn)向系統(tǒng)上,使這些系統(tǒng)對(duì)速度和轉(zhuǎn)向角度進(jìn)行相應(yīng)調(diào)整。攝像頭或GPS定位系統(tǒng)依次追蹤車(chē)輛的實(shí)際行駛軌跡,并在需要時(shí)對(duì)曲線(xiàn)路徑進(jìn)行調(diào)整或修正。
安全性與效率
整套系統(tǒng)具有極高的安全性。只要掛車(chē)和裝卸位之間有人,即使指令是通過(guò)平板電腦發(fā)出的,行人探測(cè)功能也會(huì)自動(dòng)中斷挪移操作。只有當(dāng)操作員通過(guò)平板電腦持續(xù)發(fā)出適當(dāng)?shù)闹噶?“駕駛失知制動(dòng)裝置”)時(shí),卡車(chē)才會(huì)繼續(xù)移動(dòng)。一旦操作員的手離開(kāi)平板電腦,卡車(chē)就會(huì)馬上停止。

TraXon 混合動(dòng)力系統(tǒng)在電動(dòng)模式下可以進(jìn)行短距離驅(qū)動(dòng)。由于電機(jī)可以準(zhǔn)確地計(jì)量驅(qū)動(dòng)功率,因此非常適用于挪移輔助功能。
頻繁的挪移操作會(huì)大幅增加卡車(chē)的油耗。采埃孚(ZF)在其創(chuàng)新型卡車(chē)的系統(tǒng)設(shè)計(jì)以最高效率為目標(biāo),因此可以在挪移時(shí)節(jié)省燃油。TraXon 混動(dòng)系統(tǒng)通常可以在倉(cāng)庫(kù)中采取短距離電動(dòng)模式驅(qū)動(dòng)。同時(shí),電機(jī)可提供非常精確的縱向加速度。經(jīng)過(guò)設(shè)計(jì)的轉(zhuǎn)向系統(tǒng)可以在發(fā)動(dòng)機(jī)停止工作的電動(dòng)模式下實(shí)現(xiàn)全伺服助力。